



外科手术机器人发展史
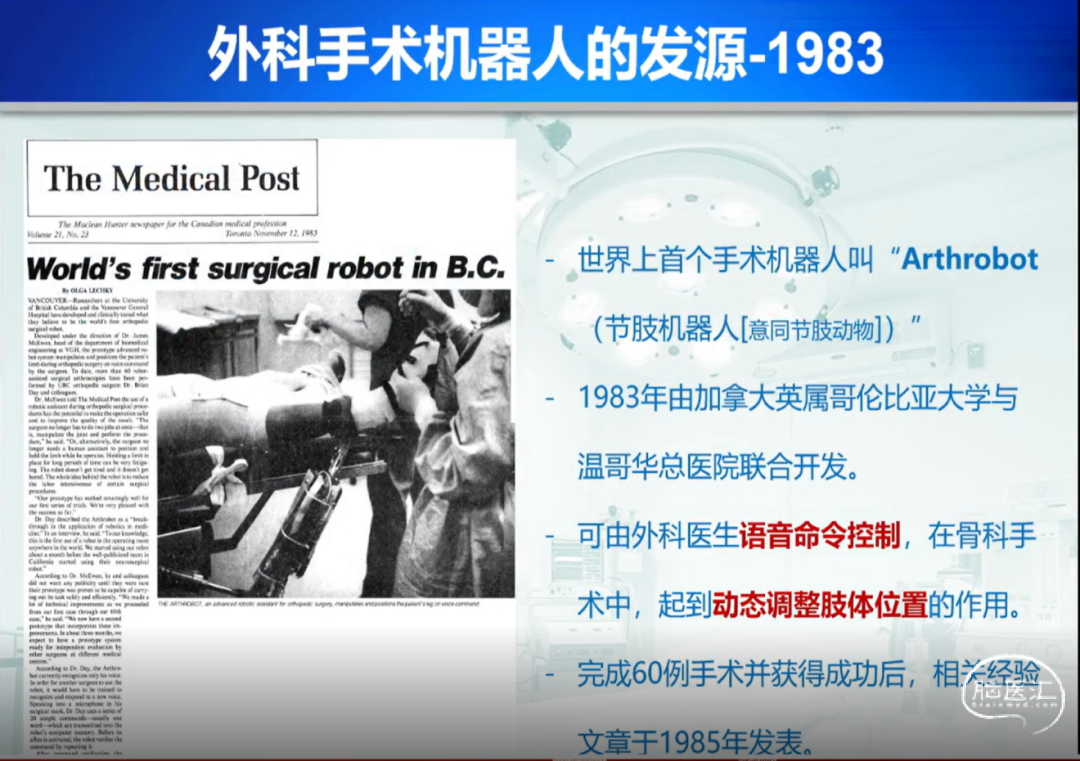
目前已报道的最早的外科手术机器人的叫“Arthrobot”,是一个节肢机器人,1983年由加拿大英属哥伦比亚大学与温哥华总院联合开发,主要是外科医生通过指令来操作机器人在骨科进行应用。这是“world’s first surgical robot in B.C.”,从这个机器人诞生之后,就有我们整个的机器人外科手术。
2010年我在美国哈佛大学学习的时候,在哈佛大学的一个小的图书馆里,我记得最早有5本关于“Robotic surgery”的书,但没有一本是关于神经外科的。当我快离开美国的时候,我听说加拿大生产出了神经外科的机器人,我本想去加拿大看一下,但直至回国都一直没能有机会。

达芬奇机器人在普通外科、泌尿外科、妇产科,都运用得很广泛,100例、1000例都有明确的数字记载,而且他们的数据都是持续收集的,让我们整个的外科界发生一个革命性的变化。
但达芬奇的机器人它的手术器械都是很粗的,在神经外科目前还不能应用。
实际上我们在讲产业革命的时候,有人很精辟的讲,所有的产业革命-无外乎就两次,一次就是机器革命,即机器代替我们手工操作;第二次是机器人革命,机器人代替机器,机器人走上各个产业的舞台。
第一台神经外科机器人
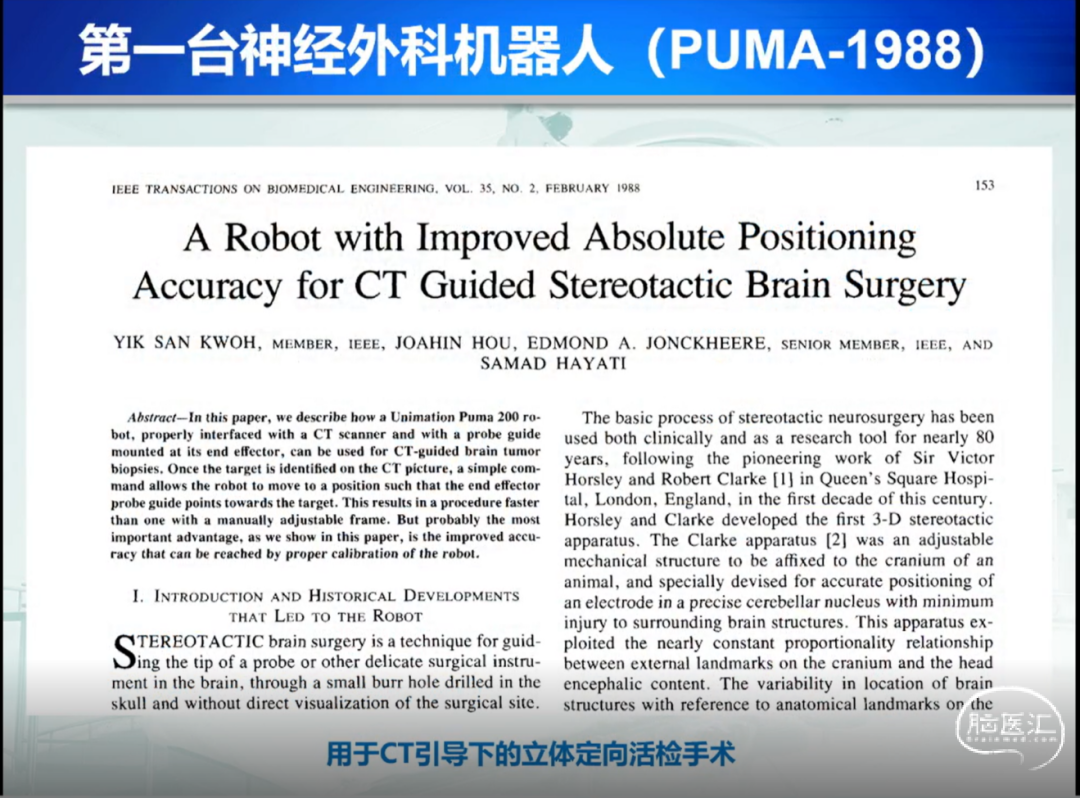
第一台神经外科机器人,叫PUMA,是在1988年,它主要被用于立体定向活检。神经外科的机器人的发展它也经历一个非常长的历程。

首先就是被动型的监督型的机器人。医生在键盘上操作,外科医生的手是不接触病人的,主要是通过键盘进行操作;继续发展到主动控制性的机器人,术者可以接受机器人来的实时信息,可以遥控操作,跟机器人有一个很“smooth”的对话。
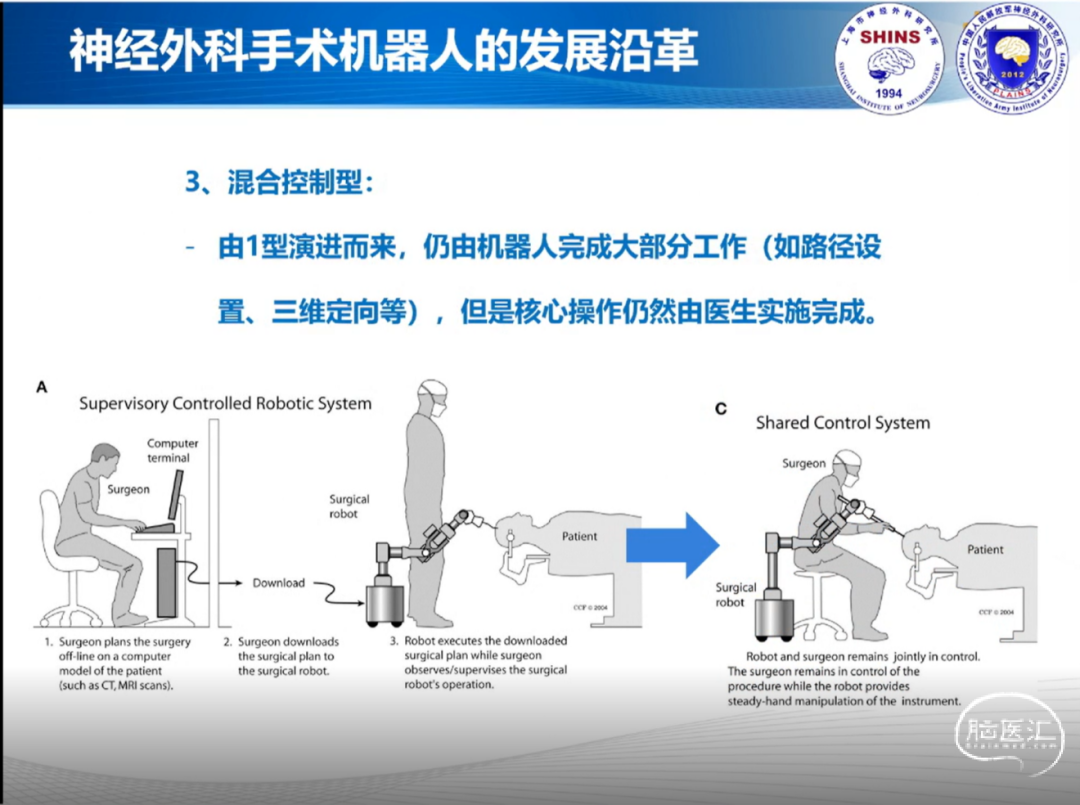
紧接着进一步的发展就是混合型的机器人,由1型机器人发展而来,仍由机器人完成大部分的工作,但是核心的操作还是由医生来完成。从A过渡到C,医生已经站到手术台前来,可以结合机器人进行操作,所谓混合性的机器人。
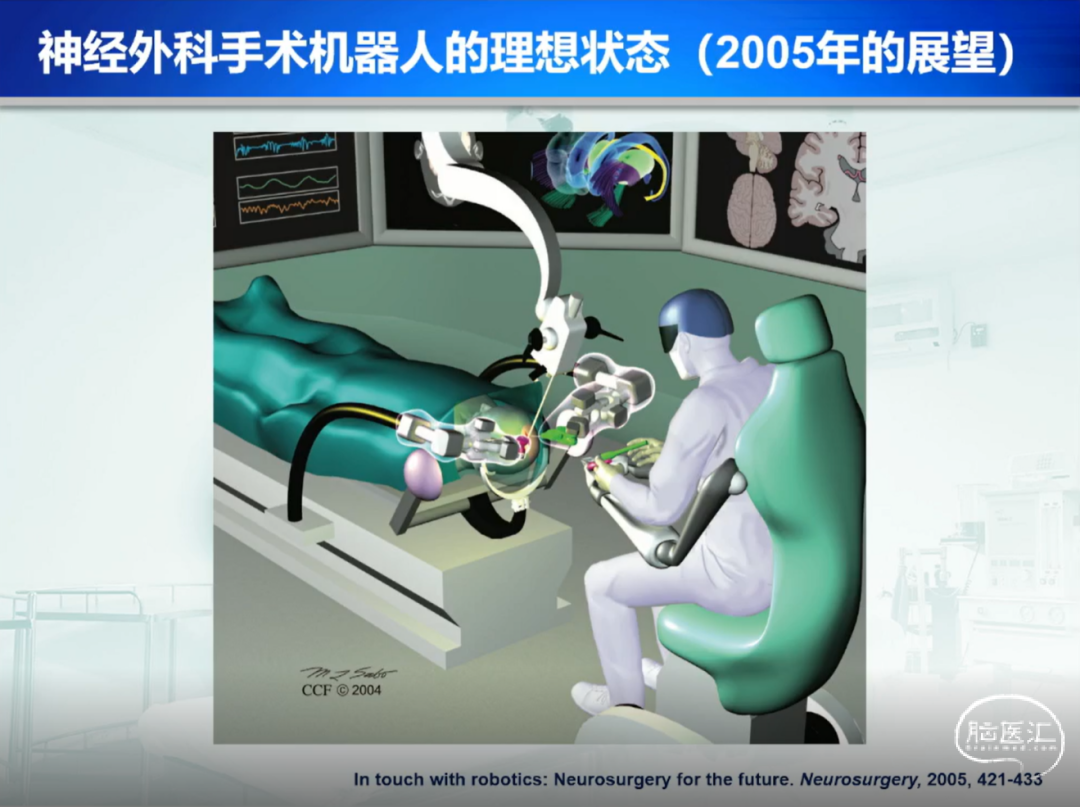
理想的机器人应该是什么样的?上图是我们发表在2005年Neurosurgery杂志上的一张照片,表达对未来机器人的一个展望。但是现在达芬奇机器人为什么没有用到我们神经外科呢?最大的问题主要是一个操作空间(有限),另外一个就是神经外科整个操作的间距都非常小,达芬奇机器人(体型)相对还是比较大一些,还不能够实现。
实际上这样一个理想状态的机器人,它就跟达芬奇机器人差不多。其整个工作原理就是通过医生和机器人的互动,配合视觉的联动,可以让医生根据头的摇动控制支臂的活动。神经外科手术需要助手,也就是holder,目前 holder是自动的或者半自动的,通过机器人的帮助用头的运动来掌控holder。
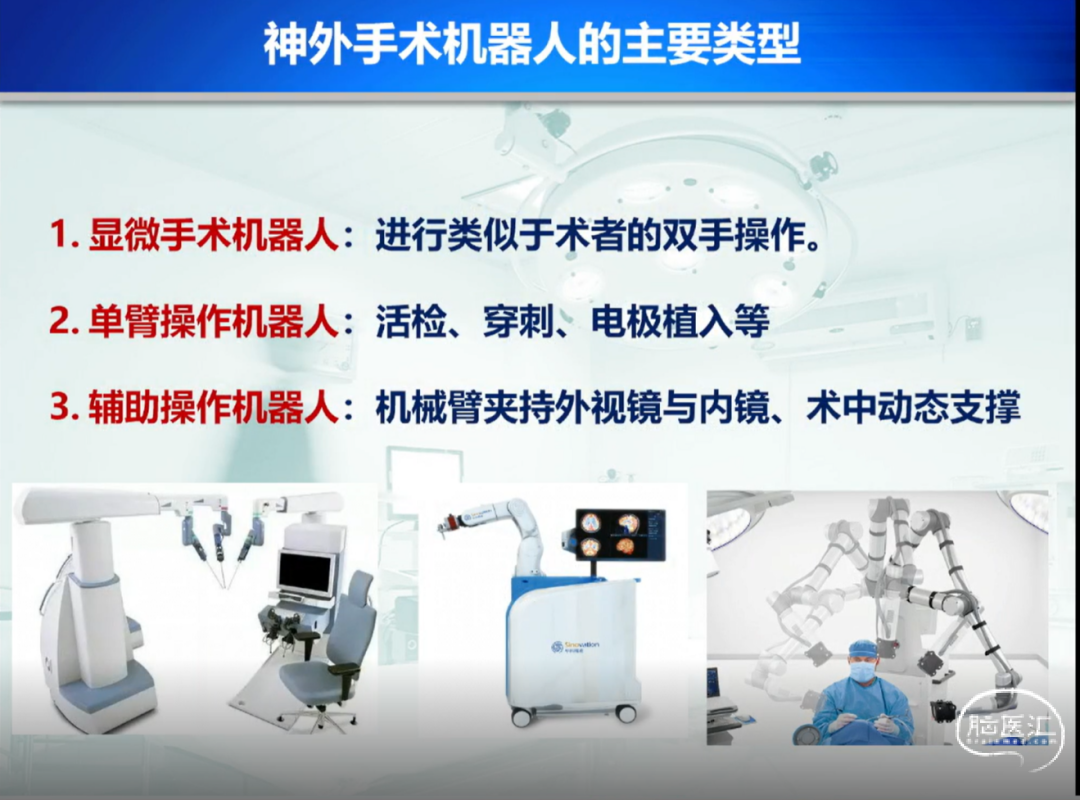
我们看一下神经外科手术机器人的种类,主要分为这三种,一个就是显微手术机器人,可以实现类似于术者的双手操作;另外就是单臂操作机器人,可用于活检、穿刺、电极植入等,目前大多数用的还是单臂机器人;还有一类就是辅助操作机器人,虽然内镜外视镜上它有一些智能的功能,但其实还不能称为真正意义上的“机器人”,主要还是实现机器人的立体定向的功能。
01
第一类:显微手术机器人
第一类是显微手术机器人,国外已有公司在尝试开发,类似达芬奇手术机器人,有一个摄像头,一个吸引管,一个双击电凝,术者在外面遥控操作,相对来讲机器人操作手术器械要更加的精细。
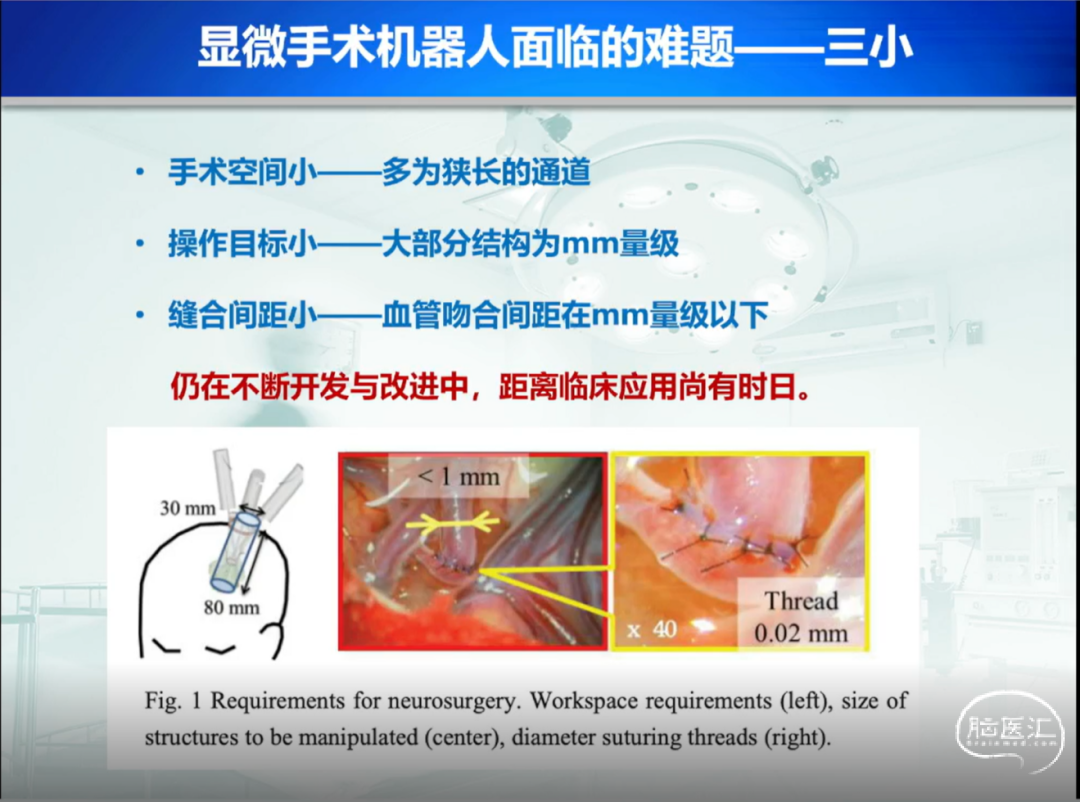
就神经外科而言,机器人仍然是面临着三个难题,一是手术空间比较狭小,手术通道比较长,就像我们做的鼻腔手术一样,通道比较狭长的话,必须通过手术器械的改进来完成。
很多做内镜的医生,都知道内镜的器械和显微外科器械它是有不同的。因为内镜的器械它是在一个狭长的空间之内操作,进去之后它要有拐弯的,而我们显微外科的器械更主要的是术者们的视线,要满足人体工程学。比如内镜的器械它的弯度是在头端,而显微外科的器械它的弯度在在肩膀这里,这是整个器械本质的不同。
另外它的操作目标也比较小,还有缝合距离也比较小。这三点是在我们整个的机器人研发过程中要不断的超越的。
如果这三个问题都解决之后,就像达芬奇机器人用于普通外科,用于泌尿外科一样,神经外科的应用也会畅通无阻。

02
第二类:单臂操作机器人
第二类是单臂的机器人,实际上我们现在最常用的华科神经外科手术机器人就属于单臂机器人。它能够精准的定位操作,而且通过它的智能影像后处理,使得包括DBS、脑机接口电极的安装、三叉神经痛球囊的植入、Ommaya囊植入等各类立体定向微创术式,都能够通过单臂机器人来能够得到解决。
我的理解,单臂的机器人最大的一个亮点就是精准,第二亮点通过它的单臂被实现部分的操作。导航和机器人有什么区别?实际上最大的区别就是说机器人它是有手臂的,导航它是没有手臂的,机器人只要有手臂有操作功能才能称之为机器人,单纯的只有导航和定位功能还不能称之为机器人。

实际上机器人就是由立体定向来发展而来的,传统的立体定向装置已经应用了几十年的时间,各方面的不足已经无法通过设计优化解决,机器人在无框架、智能化这方面更占优势。
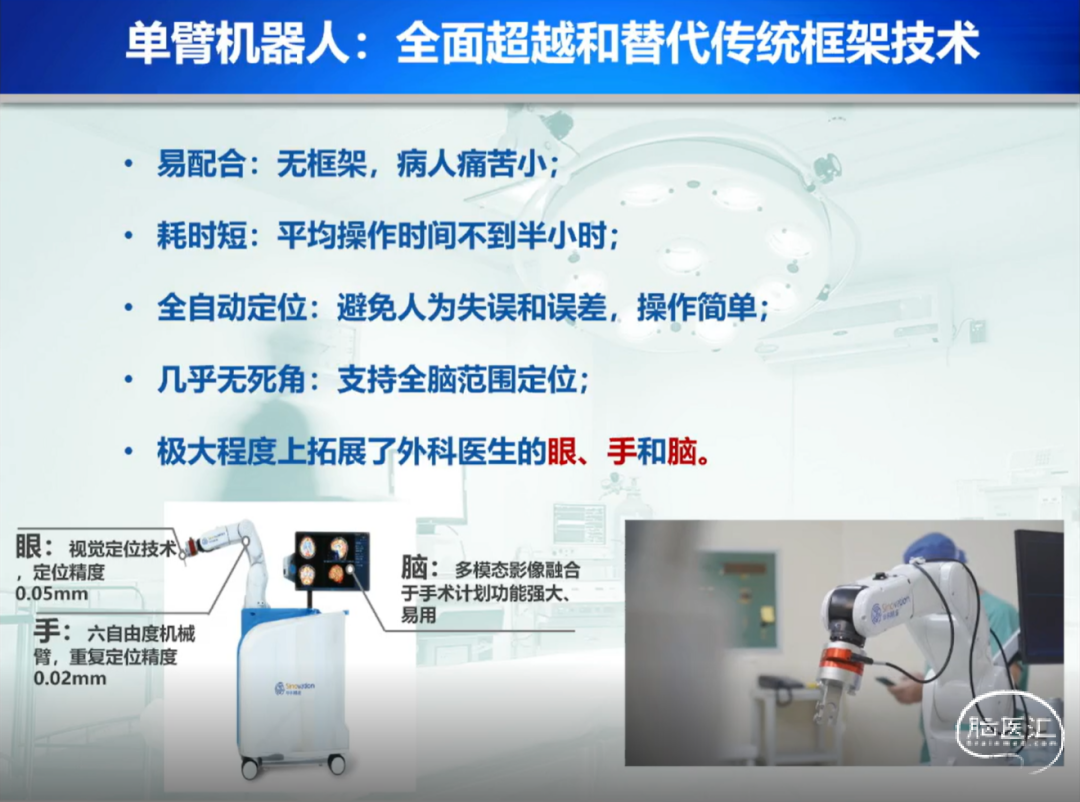
华科机器人的优点是无框架、操作耗时时间更短、全自动定位,让定位更加方便,更加简单。另外它不遗留死角。
传统立体定向框架,在做幕下手术的时候,因为下面有一个底座,会对幕下操作造成阻挡。现在做经枕入路,用机器人完全能够实现,360度无死角,这也是它的一个优势。
一例高血压脑出血患者多模态处理示例
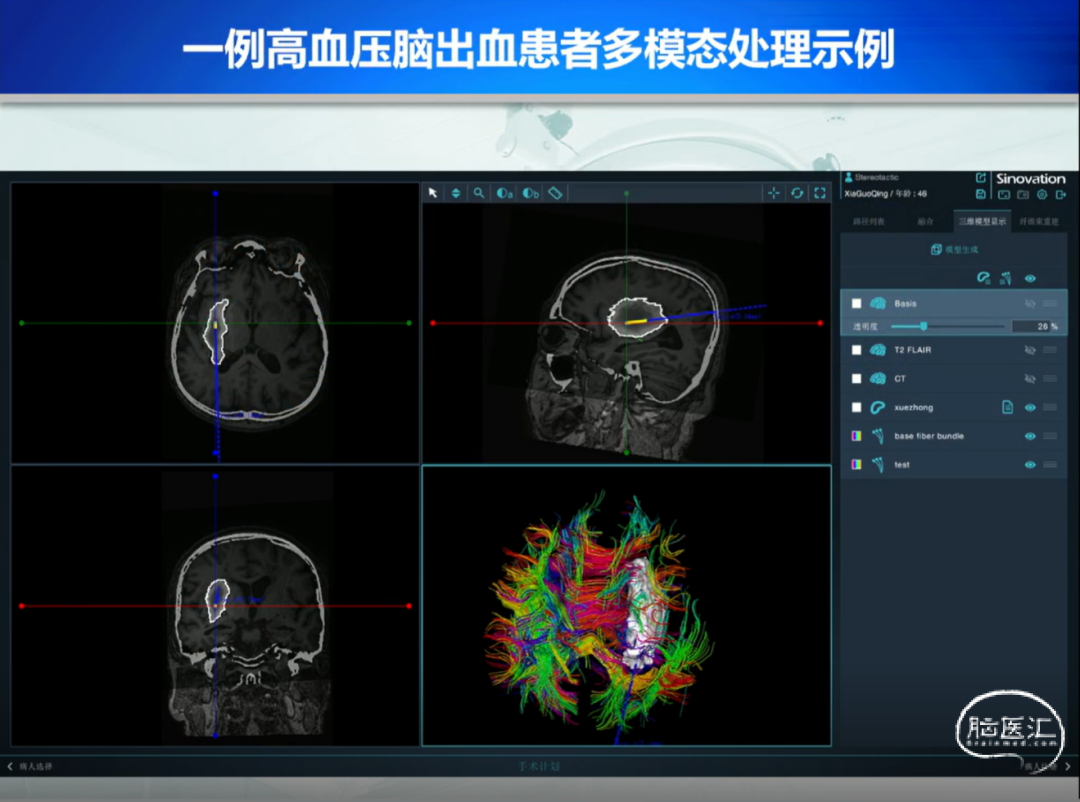
这是我们做的一个病例,我们通过机器人系统对血肿进行精准定位,手术时避开纤维束。
03
第三类:辅助操作机器人

这个是日本人开发的一个辅助操作机器人,术者手到哪里,机器手臂就跟到哪里,主要是起到一个支撑作用,保持医生术中手的稳定性。一方面让你的手保持稳定,另外就是很省力。
外科医生在做手术过程中,最大的能量还是消耗在克服重力上,机器人一方面让你少做工,另外一方面把你手固定在这个位置,让你的手非常的稳定。这类机器人,它主要是把机械臂和你的手臂是结合在一起,类似军队的“超级战士”,我们正常人是每小时是行走6公里,如果用上“超级战士”之后,每小时可以行走18公里,而且可以负重120公斤。增加我们的体能,就是这类机器人的作用。
对于脑出血这样一个疾病而言,哪些机器人更加适合脑出血?或者说更加适合我们的国情?更加适合我们的基层单位?
实际上脑出血这个手术对机器人的精准定位要求并不是特别高,它主要是要求应用方便、成本适中。现在我们已经有体积更加小、成本更低的机器人,注册也非常快,对于脑出血而言显然更有价值。
华科Q300微型机器人导航系统

目前华科的Q300机器人就有这个特点,一方面非常的小巧便携,另一方面注册快速,大大减少我们术前和术中的操作时间,而且它的定位精准度也与大型机器人相当,所以对于脑出血微创手术而言是非常有价值的。
Q300由导航工作站和机器人模块组成,可进行术前手术计划、术中实时导航以及机器人定位。


这个手术过程实际上就比我们原来那一代机器人便捷很多,一方面是体积比原来小很多,另外它的注册过程更加方便。
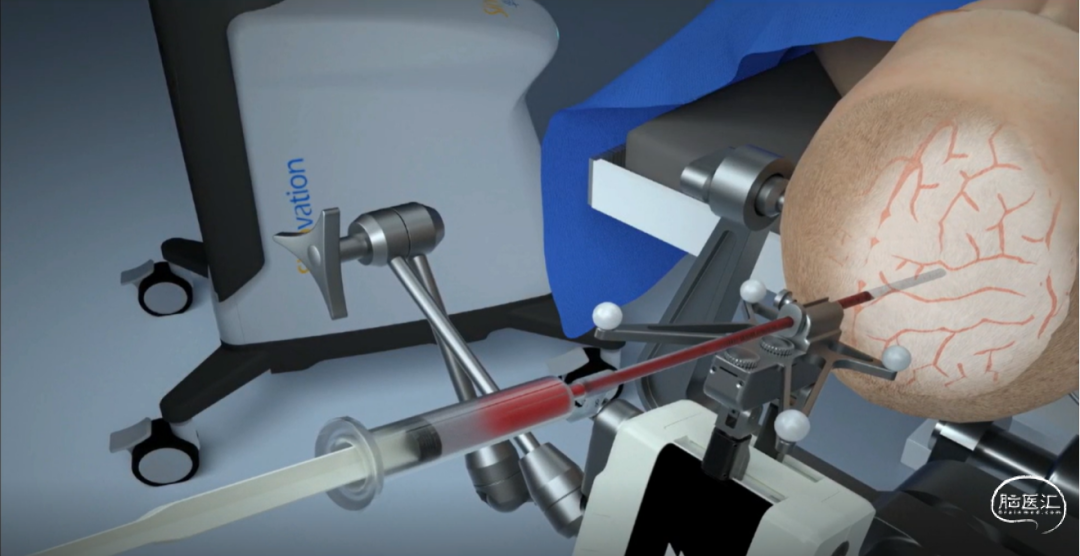
和我们原有的大型机器人相比,它在注册精度和血肿清除率上没有什么差异,但相比之下它的价格会便宜很多,这样一个小机器人实际上对于我们一个县的脑出血微创治疗技术而言,会是一个质的飞跃。
机器人辅助治疗亚急性期高血压脑出血
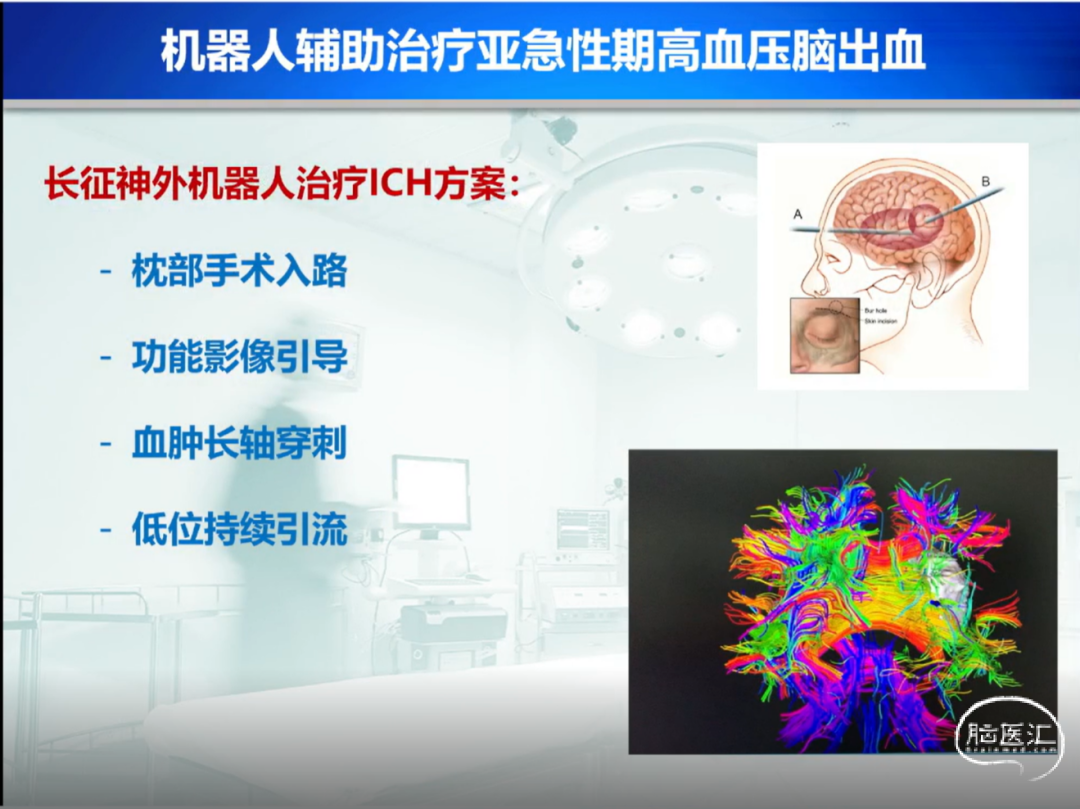
对于开展脑出血的手术的一些体会,我们现在做的是经枕部手术入路、功能影像引导、血肿长轴穿刺、低位持续引流。为什么开颅手术、内镜手术没有提低位引流,是因为显微镜、内镜下血肿基本都清除的特别干净。
但是对于立体定向抽吸这类手术而言,它有两个特点,一是血肿量小,适合机器人手术的患者出血的血肿量一般不会太大,因为手术是在亚急性期或慢性期做,一般不威胁生命;第二个特点是这类手术能够保持下来,不能发生脑疝,还是其血肿量要小;第三个特点,需要让血肿要进一步的液化,液化之后我们才能够抽吸;第四个特点就是要通过机器人辅助远离颅内的出血点。
内镜的特点是“明知山有虎偏向虎山行”,一定得对着出血点去,因为要止血;而机器人手术是不止血,我们要远离颅内的出血点,进行抽吸。如果这样的一个技术能够普及,对于县级医院这会是质的飞跃,这类手术是让能病人重返工作岗位的。
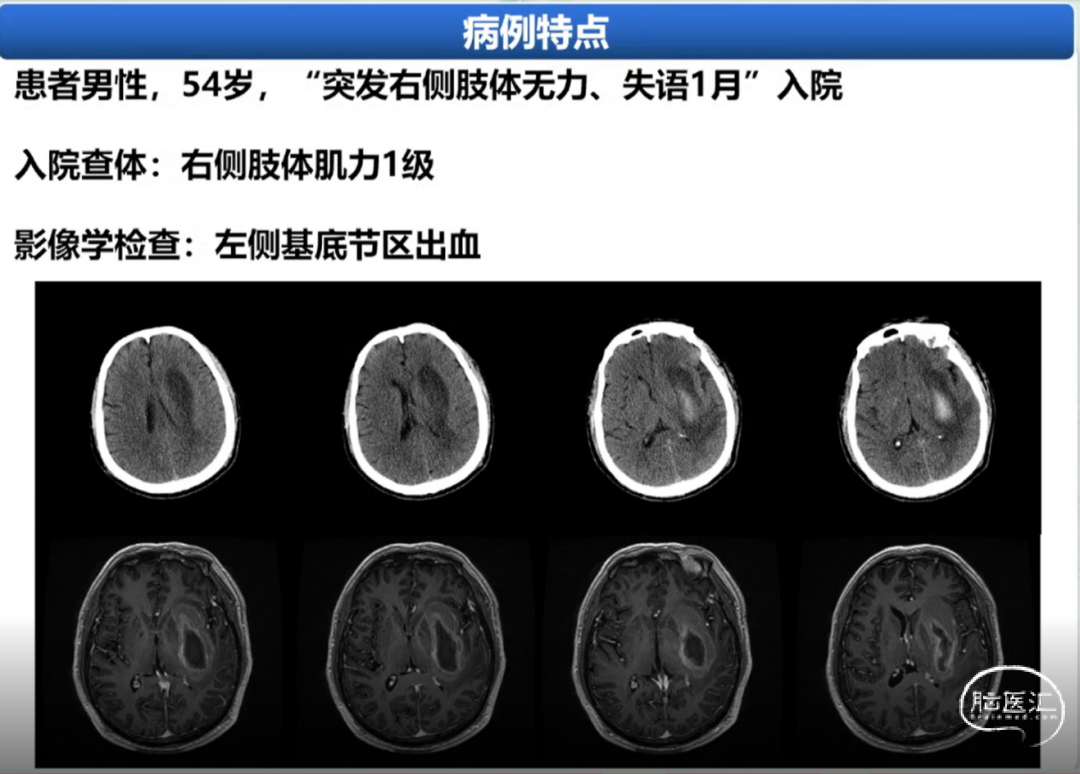
这个病人,54岁,之前在当地江苏的一个县医院治疗的,患者肢体肌力只有1级,CT看血肿基本上都吸收,但是看磁共振影像,血肿腔内有囊性信号。


我们血肿长轴设计穿刺路径,远离视觉纤维束(最大的风险),躲过距状裂。手术选择经枕入路,因为枕部是一个哑区,没有重要的纤维,而且还可以做到低位引流,它会把一部分没有抽出来的血肿引流出来。毕竟,血肿不可能100%完全抽出来。

我们的一个经验就是骨孔开大一些,在穿刺过程中穿刺针就不容易改变方向,用此方法,我们也做过更小的血肿,出血只有5毫升,定位非常精准。
这个患者是俯卧位,从枕部入路,因为患者术后回到病房是仰卧位,这样便产生一个低位引流。所以经枕入路有三个好处:一是没有神经纤维束,二是出血点在前方,三是可以做到低位引流,会产生更好的效果。

术后我们看这张片子,血肿完全没有,最主要的是要看它的功能,术后8天患者的肢体功能就慢慢恢复。

术后13天患者自己已经慢慢扶着能走,在我们病房里他就能走。

术后40天,患者在家里给我们发的照片,已经完全能恢复行走。术后三个月已经完全恢复正常。
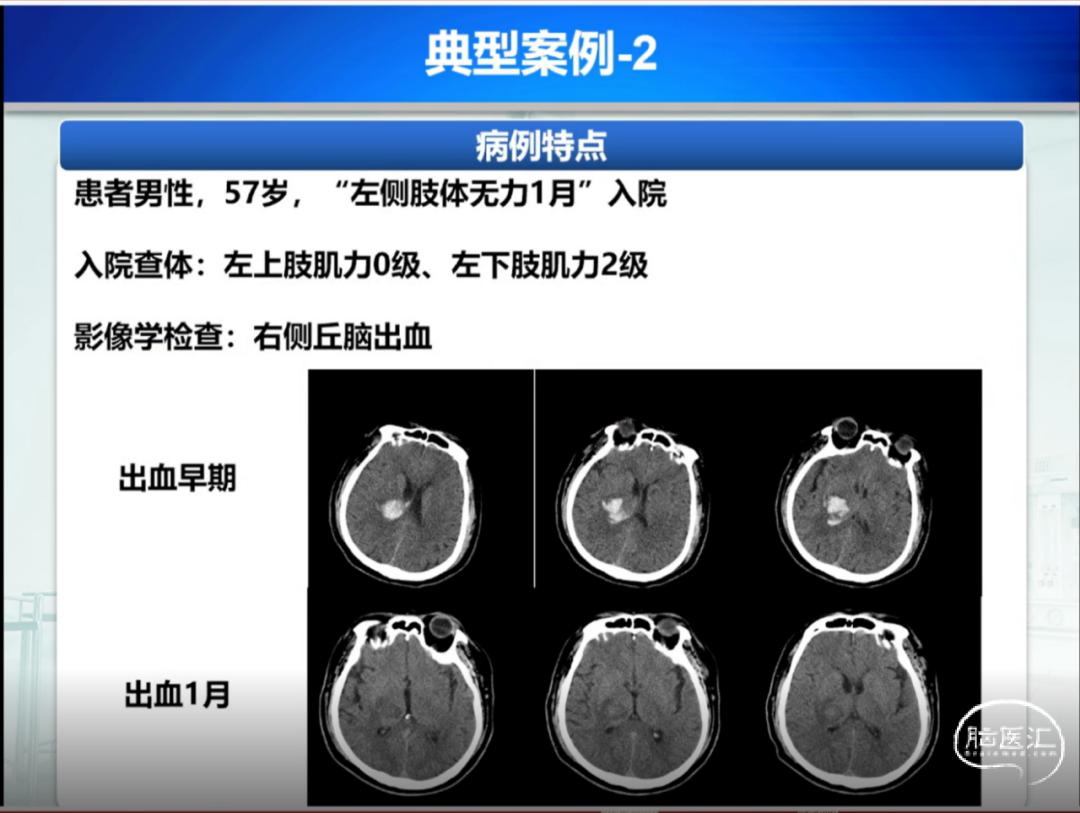
第二例患者,CT上虽然血肿量不大,但出血在内囊后肢,类似脂肪滴的形状,患者肢体肌力不行,左手不能动。我们关注的是内囊后肢的损伤,内囊后肢血肿量虽不大,但对功能的影响很大。

我们设计这样一个入路,正好在脑室搅着过去,我们故意穿过脑室,这样脑脊液可以冲进去,使血肿迅速的引流出来,让血肿液化。实际上我们相当一部分患者是穿过脑室的,通过脑室让液体互通来实现血肿的引流。
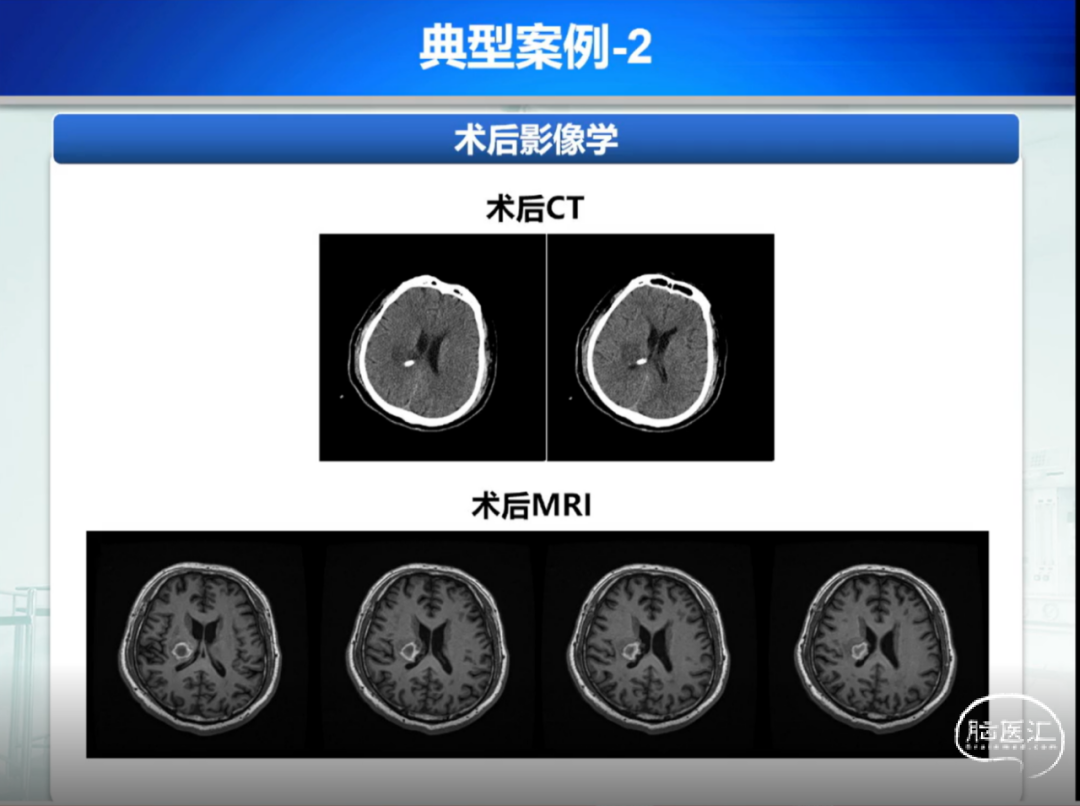
这也是一个技术要点之一,看一下术后的片子,术后血肿清除非常满意。

术后第一天患者左手马上就抬起来,立竿见影,所以这个手术我们做完之后是最有成就感的。

多模态影像重建是开展机器人手术的一个前提,否则的话你没法设计入路。另外影像学重建也是机器人手术的一个必备的本领。
另外就是我们的解剖也发生一个大的变化,原来从1.0的大规模解剖找规律到2.0个体化重建找特性,再到3.0从结构到功能解剖,通过MRI,我们可以个体化的设计入路。
将来的机器人,注册会更加的简洁,更加精准,功能更加丰富,机械臂运动更加精细。
特别是目前的小型化机器人就非常有价值,因为它足够精准、足够便捷且价格更低,小机器人为我们的脑出血手术,特别是基层医院的脑出血手术提供了一个很好的手术方案。
专家简介

侯立军
声明:脑医汇旗下神外资讯、神介资讯、神内资讯、脑医咨询、AiBrain 所发表内容之知识产权为脑医汇及主办方、原作者等相关权利人所有。
