


在医疗应用领域,远程控制、主动导航的小型软体机器人有很大的应用前景。赵选贺等人2019年8月在《SCIENCE ROBOTICS》上介绍了一种亚毫米级软体机器人,具有磁控的全方位转向和导航能力,同时其表面的水凝胶皮肤可有效减少摩擦,通过可控激光的导入来远程操作,并在脑血管模型上证明了其在复杂和受限环境中的导航能力,这为微创机器人手术开辟道路,从而更好地满足临床需求。
——摘自文章章节
【REF:Kim Y, et al. Science Robotics. 4, eaax7329 (2019) 28 August 2019. DOI: 10.1126/scirobotics.aax7329.】
研究背景
由于亚毫米级软体机器人,能够在复杂和受限环境中导航,有望有广泛的医疗应用。目前一些连续性软体机器人已经商业化,至少可以让人们在手术过程中远离射线辐射。目前一些最先进的、微型化的、商业化连续软体机器人,主要用于心脏和外周介入,可以实行磁控和磁导航,但不适合神经外科,主要因为脑血管直径更小,而且血管更为弯曲。曾经有美国FDA批准的磁性微导丝产品在上市前被召回,因为担心顶端的微小磁铁会脱落,从而导致危险。软体机器人仍被寄予厚望,但面临一系列关键挑战:1、基于气动或液压驱动的软体机器人存在一定束缚,医疗应用中无束缚驱动最好;2、驱动机制通常是高度非线性或不稳定的,很难基于定量模型进行精确控制;3、传统的软体机器人很难缩小到亚毫米级。
本研究提出一种磁控软体机器人,因为它们可以解决传统机器人的上述局限,在生物医学领域有着广阔的应用前景。它由铁磁性软材料组成,其中磁化的微粒均匀地分散在软聚合物基体上,利用外加磁场作用于嵌入粒子产生的磁力,可以远程驱动,这种驱动基于定量模型的精确控制。同时,利用铁磁性微粒作分布式驱动源,这样磁控软体机器人达到亚毫米量级,并可在条件受限的环境中实施导航。因为导航前行时会产生巨大摩擦力,机器人表面的水凝胶皮肤因含水量高可大大降低表面摩擦。
研究方法与结果
铁磁复合油墨由可磁化微粒的弹性复合材料制成的NdFeB(钕铁硼磁铁)颗粒与未固化的PDMS(聚二甲基硅氧烷)树脂或TPU(热塑性聚氨酯)以特定的体积比溶解在溶剂中均匀混合而成的。通过打印或注塑成形方式制成机器人主体,表面涂以由交联亲水性聚合物(聚二甲基丙烯酰胺,PDMAA)组成的水凝胶皮肤,可降低摩擦力;在NdFeB颗粒和水凝胶皮肤之间覆以二氧化硅外壳,防止界面的腐蚀。机器人的驱动设计基于主体的磁性响应尖端,其形变与转向能力受粒子浓度和外加磁场的影响。
机器人具有主动转向导航能力,可适用于复杂环境的导航,比如脑血管系统。本研究应用一实际大小的硅胶脑血管模型,模拟脑血管结构的高度复杂和曲折性,涉及多个锐角和拐角,并包含动脉瘤。血管模型中充满血液模拟物,用以模拟导丝与血管间的摩擦。机器人能够顺利地导航通过目标路径,完成任务,没有明显的困难或意外的运动。在比较使用和不使用水凝胶皮肤的磁控软体机器人的导航性能时,水凝胶皮肤的重要性和有效性得到展示。最后将激光引入机器人,并在颈动脉血管模型上显示可控激光的作用。
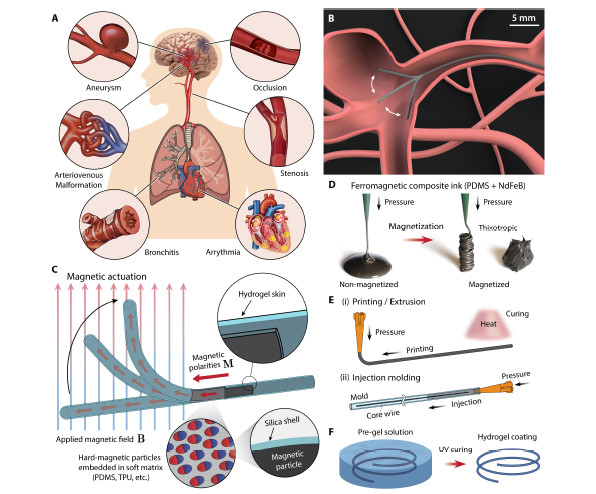
图1. 铁磁软介质水凝胶机器人示意图。(a)具有主动转向和导航能力的小型软体机器人可到达人体内难以到达的区域,具有实用性;(b)亚毫米级软体机器人在复杂血管系统中的动脉瘤内具有主动可操纵性;(c)可编程的软体机器人磁响应尖端示意图。可编程磁极是由嵌入在由软聚合物基质制成的机器人主体内的硬磁粒子组成。水凝胶表皮在机器人表面提供一层水化的自润滑层,包裹在磁性颗粒周围的硅胶外壳防止了界面的腐蚀;(d)磁化前后的基于PDMS+NdFeB(20%体积比)的铁磁复合油墨。当被磁化时,自由流动的墨水由于嵌入的磁性粒子之间的相互作用而成为具有剪切力的触变糊状物;(e)基于(i)打印/挤压和(ii)注塑的制造方法。磁化墨水通过微喷管喷出,完成打印;在微型模子中放置一个同心轴功能芯,油墨注入,完成注塑成型;(f)磁控软体机器人外表面涂以水凝胶皮肤。
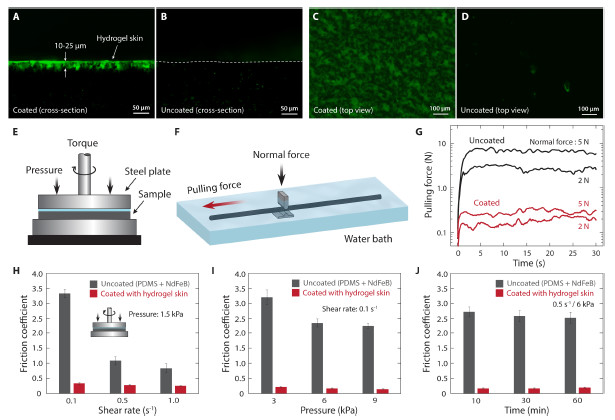
图2. 水凝胶皮肤作为润滑层。(a)PDMS+NdFeB涂层样品(20%体积)的横截面图,水凝胶皮肤由吸收的荧光素显示;(b)无水凝胶皮肤的样品。(b)中的虚线表示未涂层样品横截面边界;(c)带水凝胶皮肤的涂层样品和(d)未涂层样品的俯视图。未涂层样品中的荧光斑点是由于残留的荧光素吸附在表面;(e)使用流变仪测量摩擦系数的试验装置示意图。(f)试验装置示意图,测量在施加法向力的情况下以恒定速度拉动圆柱形试验样品(直径为8 mm)所需的力;(g)在两种不同的受力条件(2N和5N)下,以200 mm/min速度对涂层和未涂层样品进行拔拉试验时的时间-拉力半对数图;(h)在不同剪切率和(i)法向压力下涂层和未涂层样品的摩擦系数;(j)在6 kPa的压力下以0.5/s的剪切率,时间从10分钟至60分钟,摩擦系数的测量。(h)至(j)的误差条表示从五次测量中获得的平均值标准差。
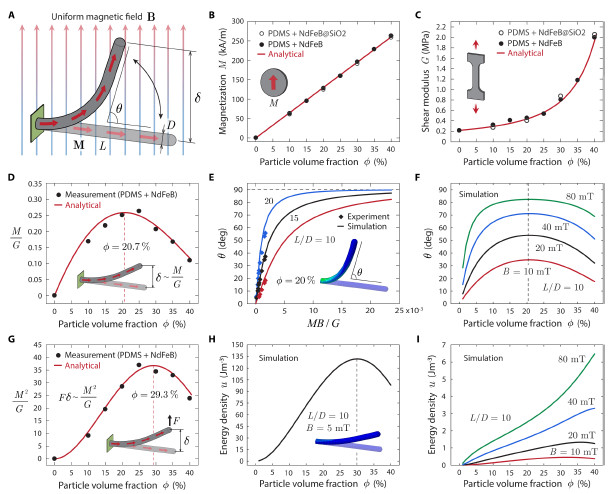
图3. 磁控软体机器人的驱动优化设计。(a)具有沿轴向方向的均匀磁场M的铁磁软机器人示意图,该铁磁软机器人朝垂直于主体施加的均匀磁场B的方向偏转。机器人的无约束长度和外径分别用L和D来表示。挠度角θ表示自由端的挠度;(b)磁化强度M,与嵌入磁粉的体积比呈线性相关;(c)不同磁颗粒浓度下铁磁复合材料的剪切模量(用g表示);(d)M/G变量,M/G是小弯曲变形程度的特征量;(e)根据有限元模拟和实验测量预测的驱动角;(f)在不同的驱动场强度下,驱动角随颗粒浓度的变化;(g)M²/G的变化,M²/G表示小弯曲情况下偏转物体的能量密度;(h)小弯曲和(i)大弯曲情况下,通过有限元模拟测量平均能量密度。
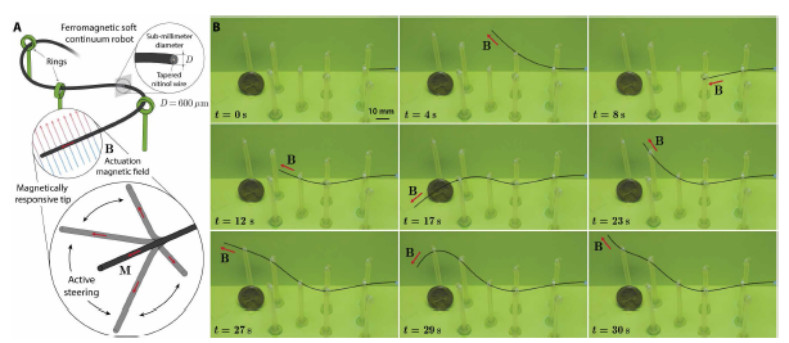
图4. 机器人的主动转向和导航能力演示。(a)具有磁响应尖端(均匀磁化强度为m)和锥形镍钛磁芯的磁控软体机器人示意图,在磁驱动下主动转向和导航。(b)基于PDMS + NdFeB复合材料的磁控软体机器人在磁驱动下,通过一组圆环进行的导航实验演示。演示样机的外径为600μm。
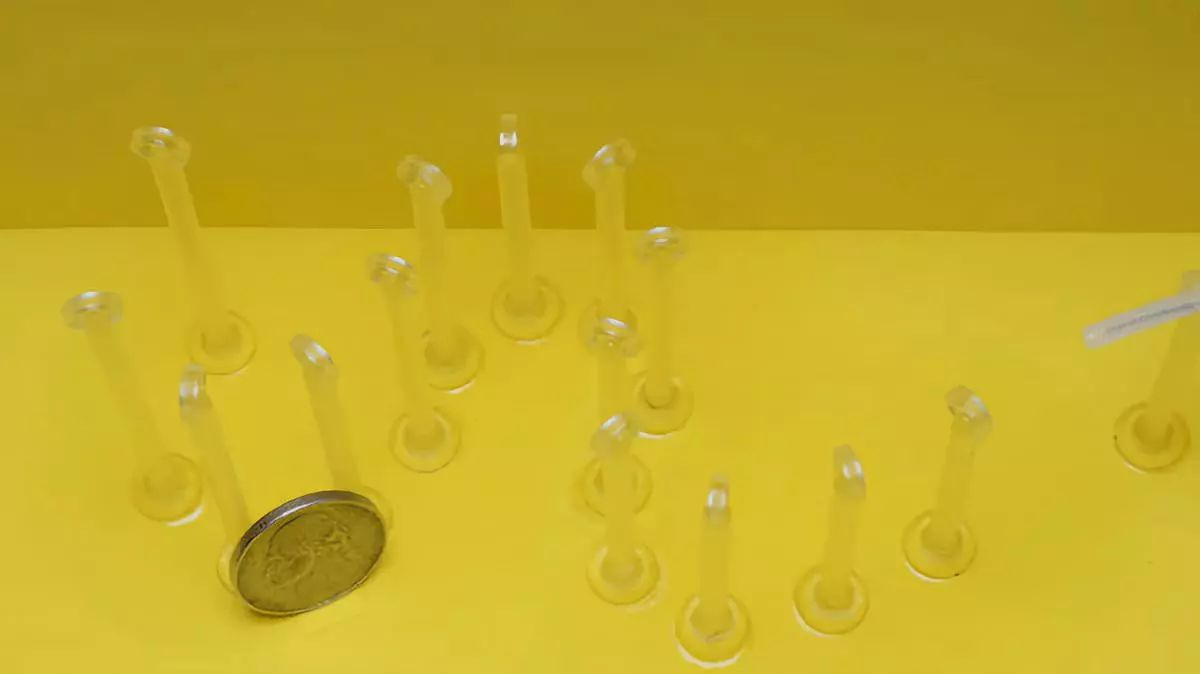
图5. 机器人在曲折的道路上受控前进。
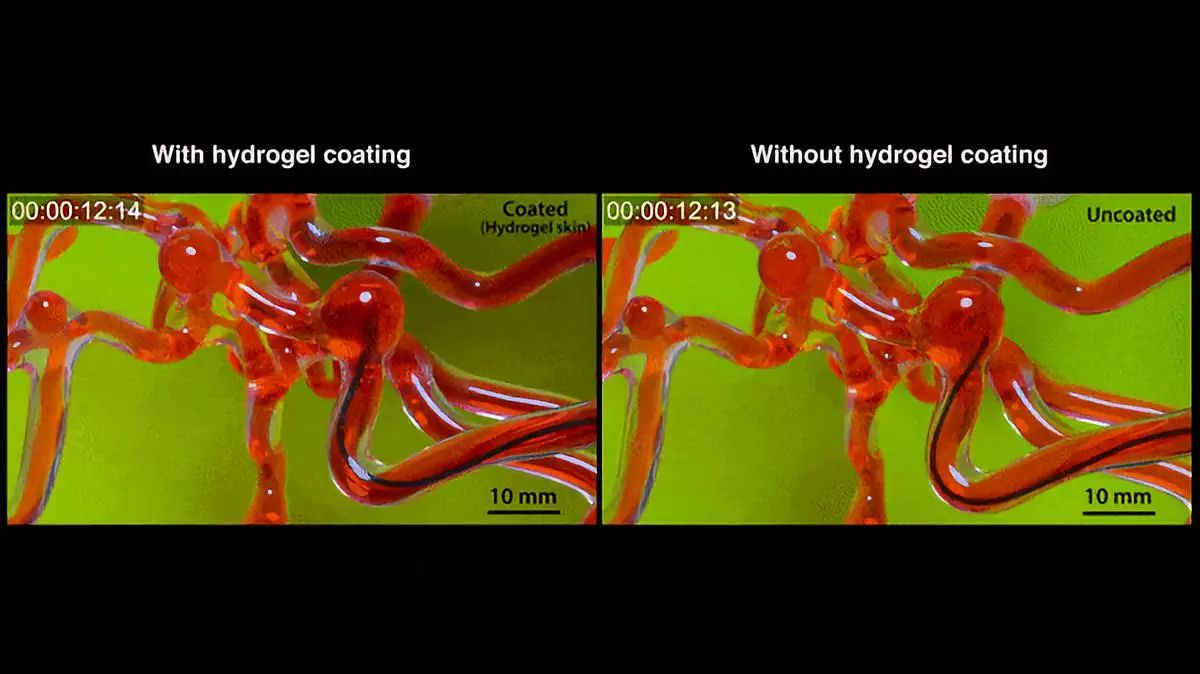
图6. 有或无水凝胶皮肤机器人在三维脑血管模型上的运动比较。
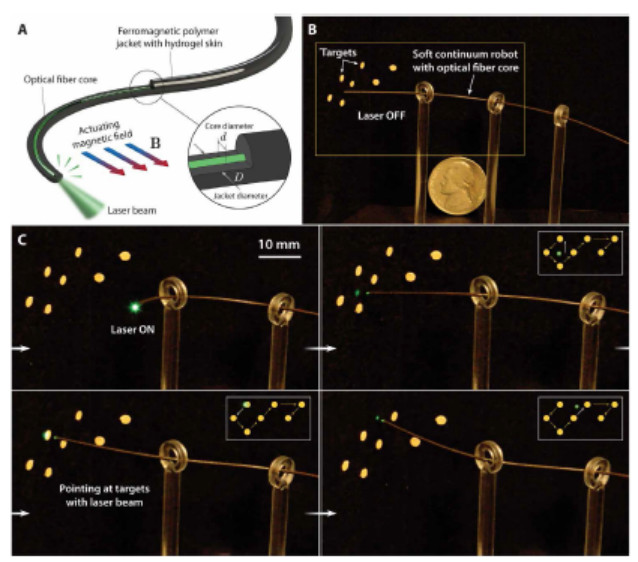
图7. 可控激光导入演示。(a)带有光纤的磁控软体机器人示意图,光纤包含在机器人主体中,通过它导入激光;(b)可控激光导入的实验装置演示;(c)在全方位磁转向基础上,按规定顺序用激光束精确指向小目标(2毫米点)的激光发射头的近景。操控磁场(20-80mT)由一个在40-80mm距离范围内,高和直径均为50 mm的圆柱形永磁体产生。样机的外径为500 μm。
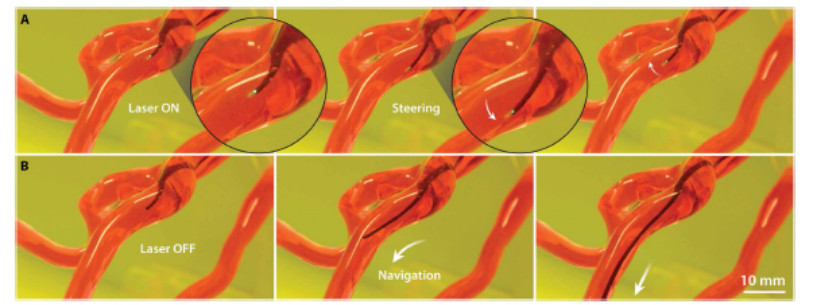
图8. 颈动脉中可控激光导入的模拟演示。基于磁控的磁控软体机器人(a)在模拟颈动脉的不同靶点发射激光束;(b)在关闭激光后向下游导航。在导航过程中,近端被推动以推进机器人前进。
结论
本文介绍了一种基于可编程铁磁软材料的亚毫米级软体机器人,在磁驱动下具有全方位转向能力。基于连续介质力学理论和有限元仿真分析,建立了优化的设计策略。水凝胶皮肤可大大减少摩擦力,因此能够在曲折和狭窄的模拟血管系统中导航进行。将光纤植入机器人体内,实现了可操纵的激光导入,这表明磁控软体机器人具有广泛的、潜在的医疗应用前景。
对于本机器人的生物相容性问题,目前还不肯定。因为NdFeB粒子被包裹在硅壳内,PDMS或TPU基质和水凝胶皮肤均具有生物相容性,我们相信铁磁软连续介质机器人可能是生物相容的,没有急性细胞毒性,然而这需要进一步的研究。
目前研究仍然存在一些局限性。首先,在演示中呈现的磁力转向和导航控制是通过视觉反馈直接实现的,这与人体血管内导航是不同的。由于机器人包含射线下可见的不透明粒子,在临床应用中,通过放射成像可实现导丝/导管的可视化,因此标准的放射成像系统可直接适用于临床环境,这需要进一步研究。同时,本文演示的磁控转向操作是通过调整单个永磁体的位置和方向手动实现的,为了提高精确度,需要在全方位和/或空间选择性磁场控制方面有更新进展。
上述技术的实现与完善,磁控软体机器人将可以实现一系列现有技术无法实现的微创介入手术。本方案的软体机器人达到亚毫米级,这样能够以最小的侵入方式进入难以触及的区域,如脑血管系统远端。总体而言,磁控软体机器人为微创机器人手术开辟了新的道路,可治疗以前无法到达的病变,从而解决临床医疗中的挑战,并更好地满足临床需求。

